- 鋳物
- タップ
- ボルト
- アンカーボルト
強度比較
| 鋳物せん断強度 |
(KN) |
| ロボットシリーズ |
鋳物せん断強度 |
| トール |
3230 |
| ミディアム |
2727 |
| ミニ |
1286 |
| 最肉薄部の計算値 |
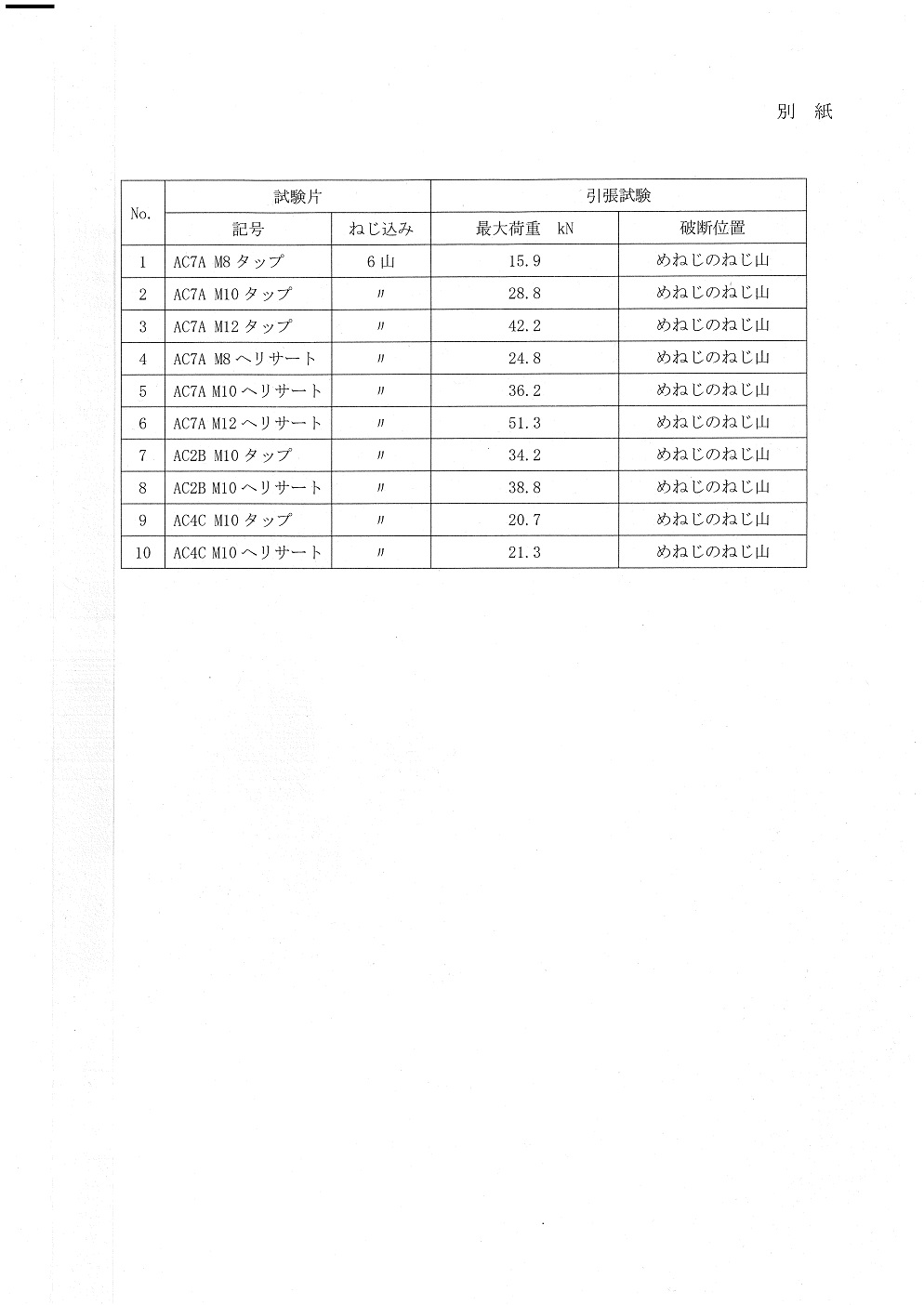
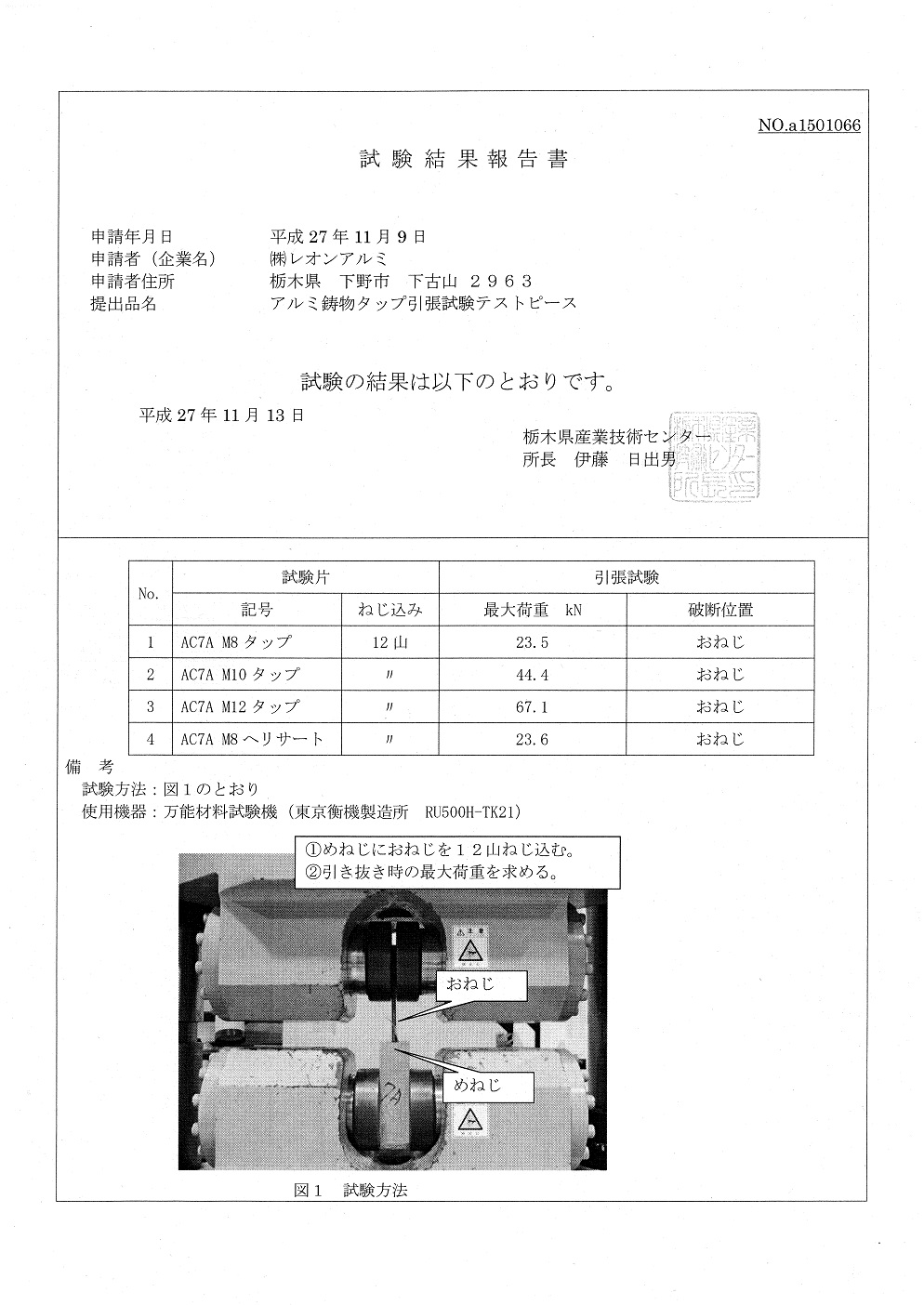
| タップ破壊強度 |
(KN) |
| サイズ |
タップ破壊強度 |
| M8 |
94以上 |
| M10 |
177以上 |
| M12 |
268以上 |
| ボルト引張り強さ |
(KN) |
| サイズ |
引張り強さSUS304 |
| M8 |
72 |
| M10 |
116 |
| M12 |
168 |
| アンカーボルト引き抜き強度 |
|
(KN) |
| サイズ |
オールアンカーの引抜き強度 |
ケミカルアンカーの引き抜き強度 |
| M10 |
9 |
50 |
| M12 |
13 |
60 |
| M16 |
20 |
102 |
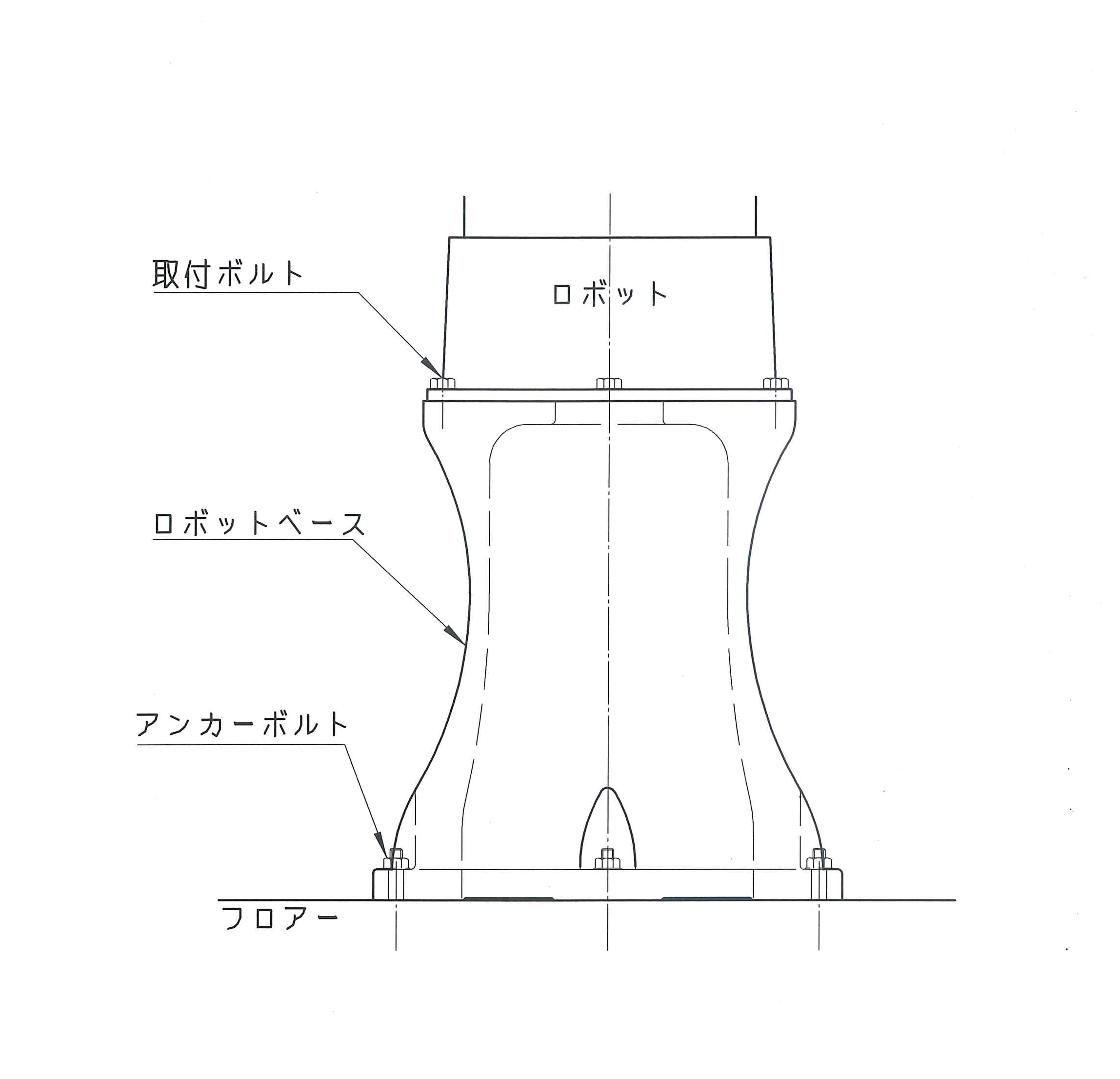
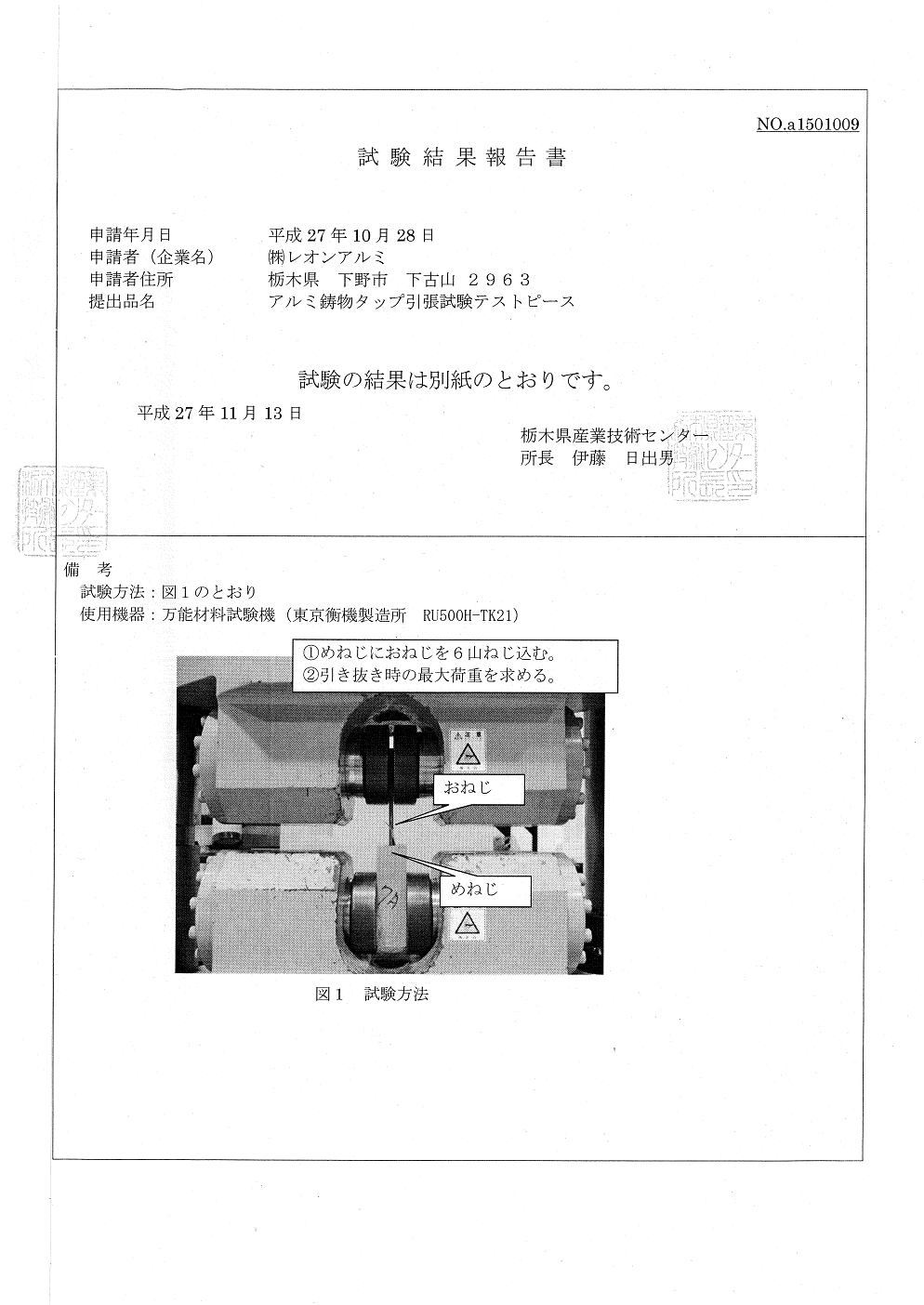
図の様にロボットベースを床にオールアンカーで固定し、これにロボット固定して垂直方向に引き抜く荷重をかけた場合の各要素を比較したものです。
特にタップの破壊強度は、実際に引張試験を実施した結果より、ボルトの許容荷重より大きい事が明確になりました。
最も弱いのは、アンカーボルトの引き抜き強度になります。ロボットの搬送重量や速度による衝撃荷重を考慮しベースの固定方法を検討し、安全に御使用ください。(参考資料・3)
以下それぞれの詳細データを記します。
| (mm) |
| 外周 |
内周 |
肉厚 |
AC7A素材 |
| φ210 |
φ180 |
15 |
140N/㎟以上 |
1285KN |