〒329-0502 栃木県下野市下古山2963Tel:0285−52-0301Fax:0285−52-0302
お知らせ
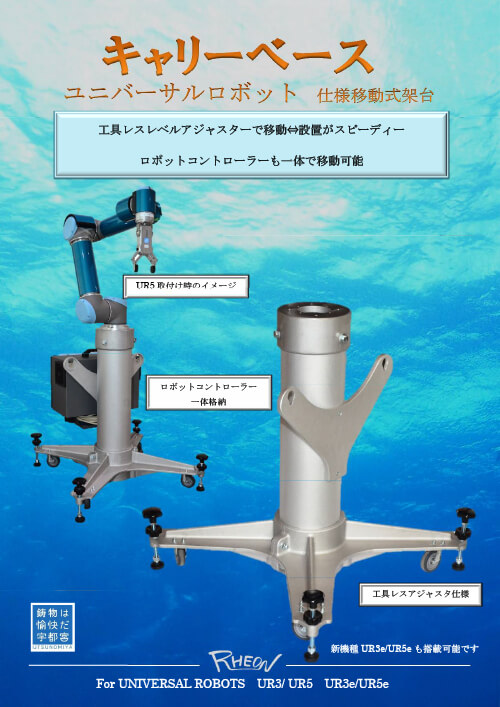
製品概要
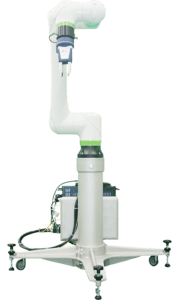
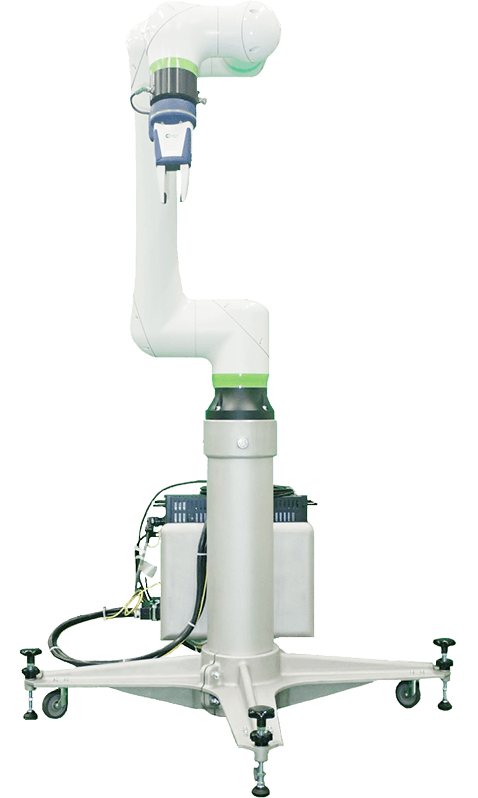
世界で先行して普及していた協働ロボットが、ついに国内でも導入されるようになり、普及が進んでいます。しかし、従来のロボット用標準架台は高価であり、高さの調整ができず、重く、使い勝手が悪いという現場の不満がありました。こうした課題に対応し、使用者の視点に立った新しい架台をリリースしました。
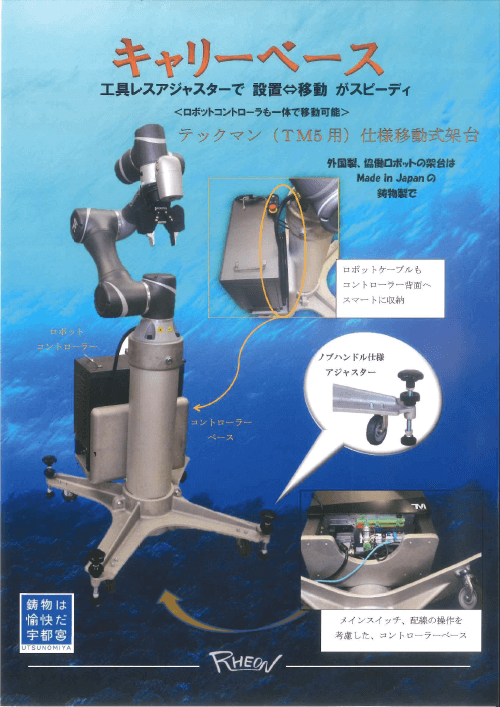
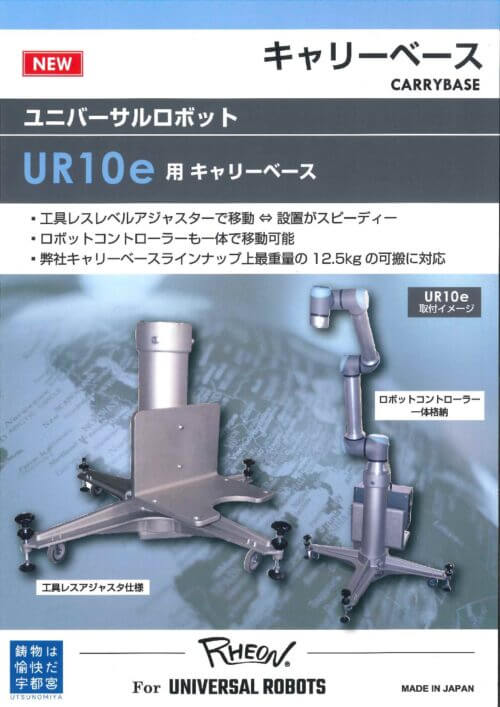
さらに、今後急速に増加する各種協働ロボットに対応するため、鋳物一体型ではなく、ボルト組立仕様を採用しました。これにより、必要なパーツだけをロボットに合わせて新たに製作し、さまざまなロボットに柔軟に対応できる仕様としました。
是非、協働ロボットには移動式ロボット架台キャリーベースを御活用ください。
共通仕様
キャスターとノブハンドル仕様アジャスターで設置⇔移動がスピーディーアンカー固定不用の用途専用架台
協働ロボットの衝突停止荷重(約100N)でも安定して自立(許容転倒荷重参考)
アルミニウム製、塗装レス仕様で塗装片剥離のリスクなし標準仕様(表面ショットブラスト仕上げ)
鋳物パーツ AC4C-Fパイプフレーム A6063T
●4輪自在キャスタ(静音仕様)●旋回部(ラジアルベアリング入り)●エラストマー車輪(ラジアルベアリング入)
製品ラインナップ
資料ダウンロード
※下記画像をクリックするとPDFが表示されますので、そちらからダウンロードされてください。