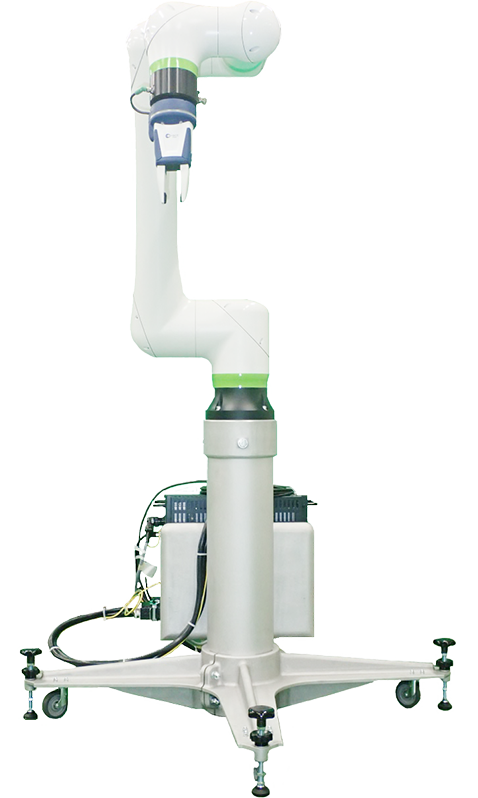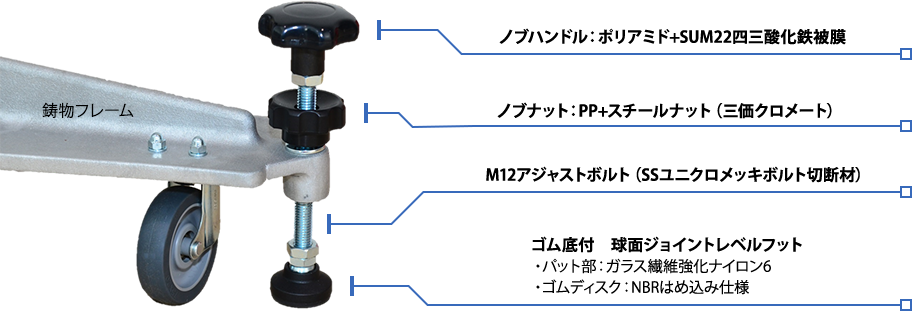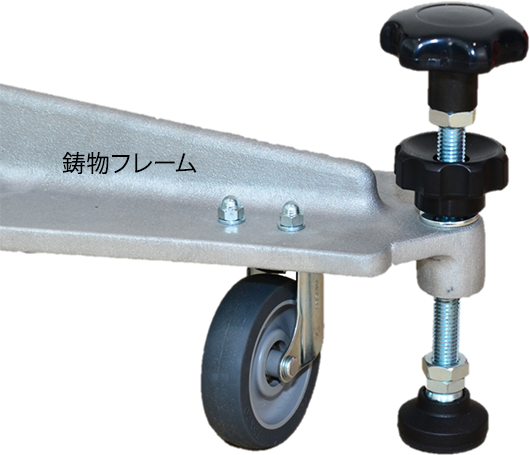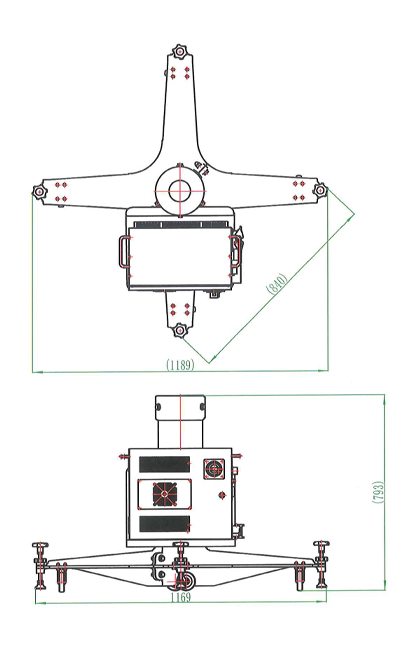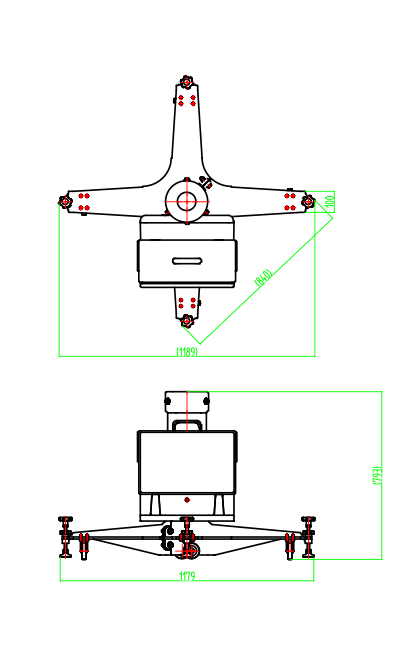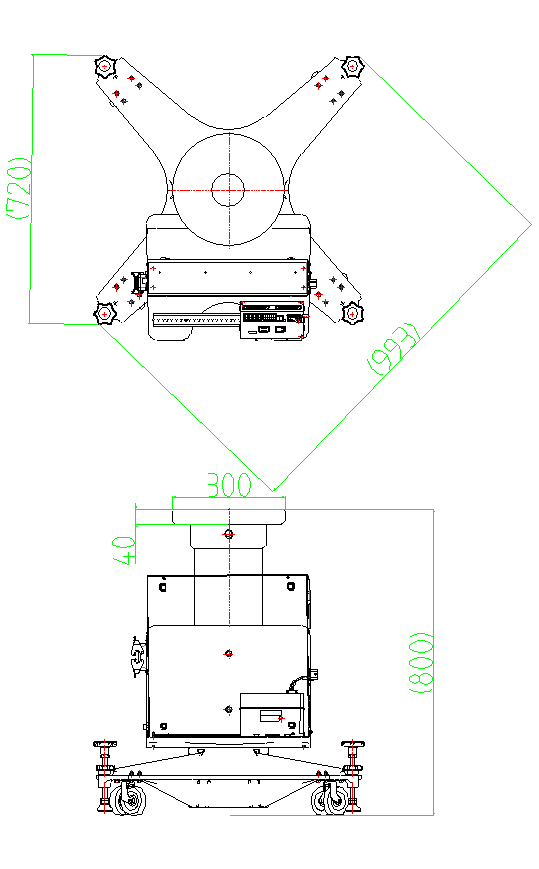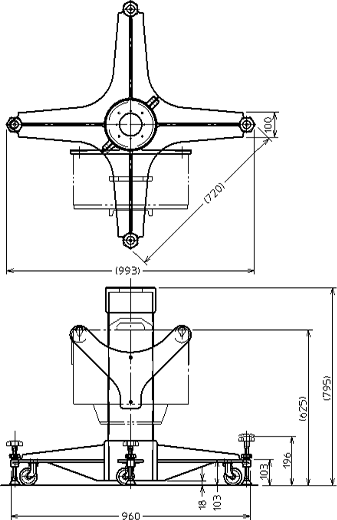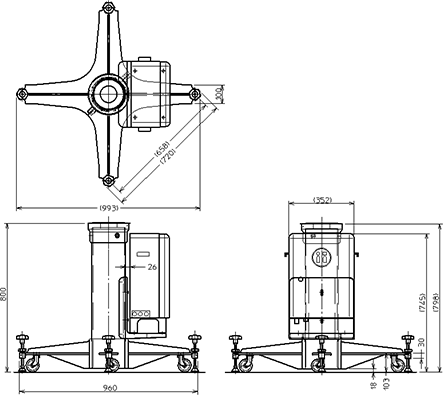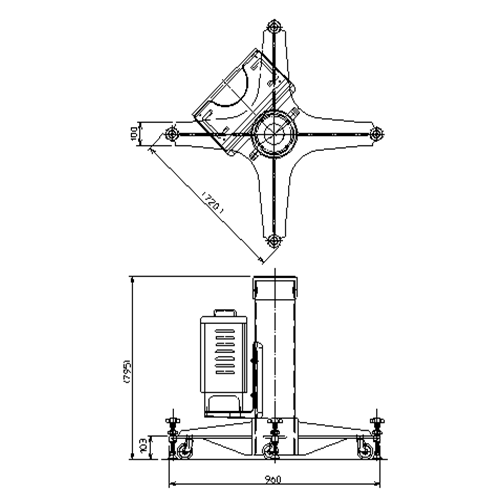

メインフレームはパイプ素材の組立式を採用・指定の高さに変更対応可能・工具レスアジャスタ仕様
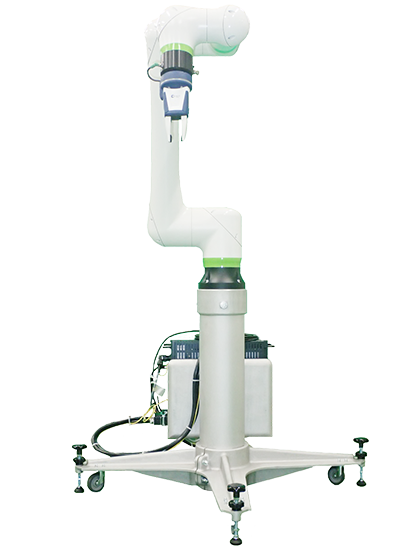
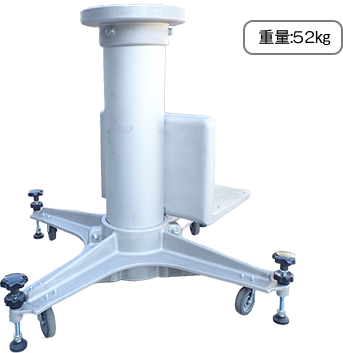
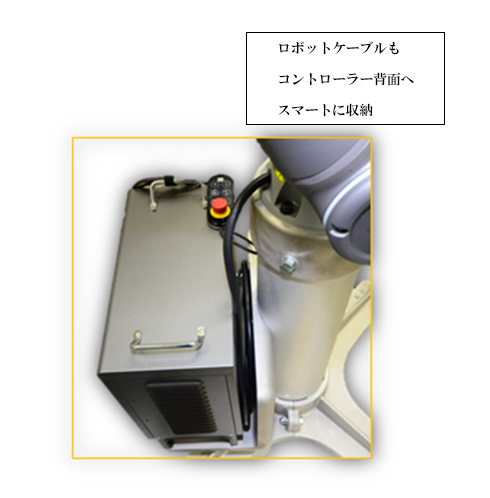
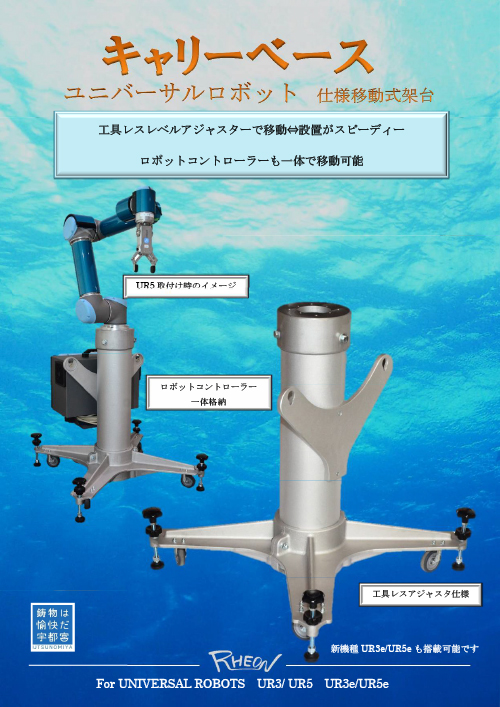
協働ロボットには移動式ロボット架台キャリーベースを是非御活用ください
世界で先行していた協働ロボットがようやく国内でも解禁となり、普及が進む中で
ロボットの標準架台は
高価・高さの変更にも対応しない・重い・使い勝手が悪い等、現場の不満を踏まえ、使用者の立場に立った架台をリリース致しました。
今後も急速に機種が増えていく各種協働ロボットに対応すべく、鋳物一体仕様ではなく、ボルト組立仕様を採用
必要なパーツのみをロボットに合わせ新規製作する事で、様々なロボットに対応できる仕様としました
NEW
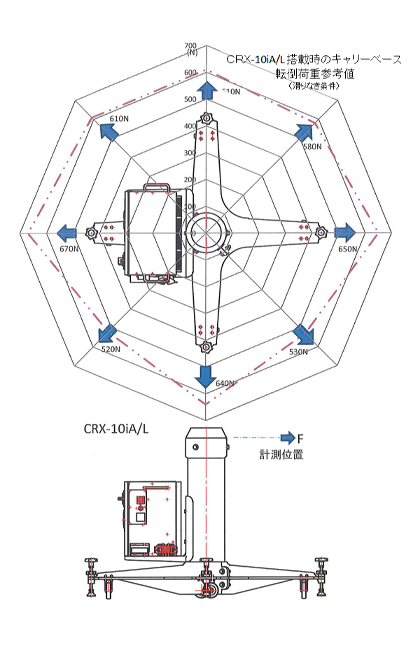
ファナック製協働ロボット
CRX-10iA・10iA/L用キャリーベース
2020年12月発売開始致しました。
NEW
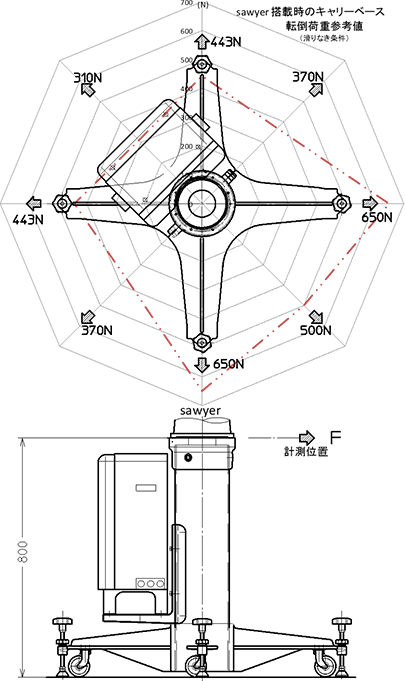
三菱電機製協働ロボット
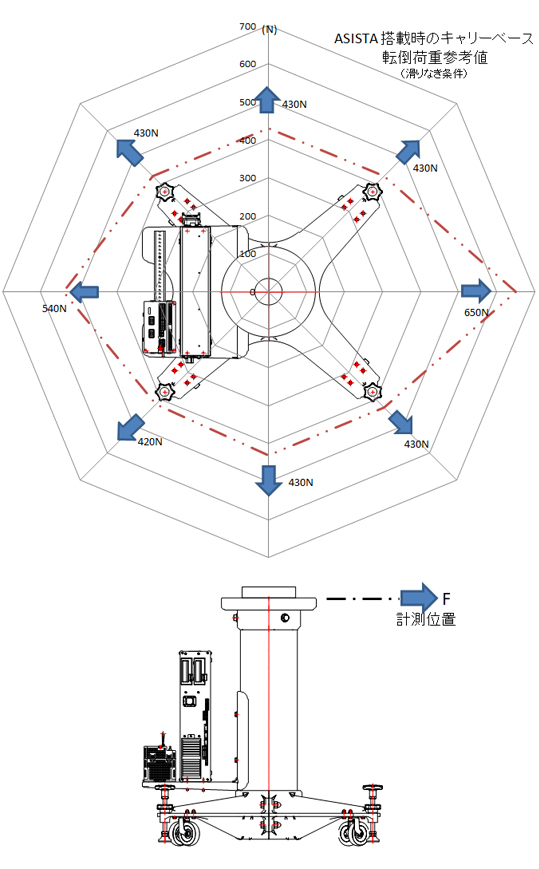
assista用キャリーベース
2021年3月発売開始致しました。
NEW
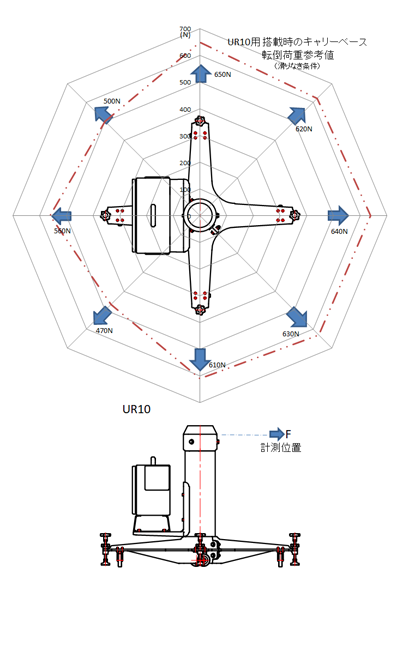
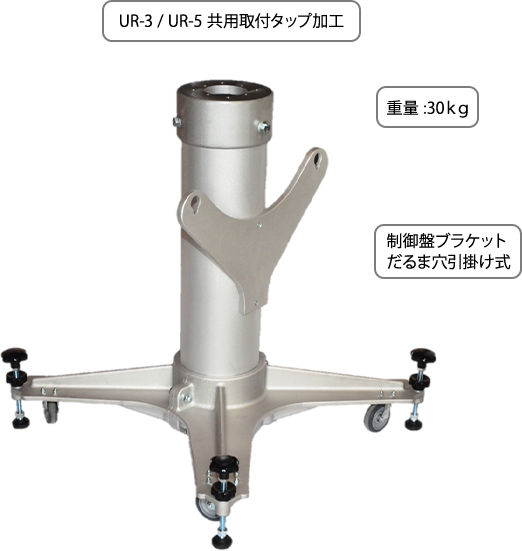
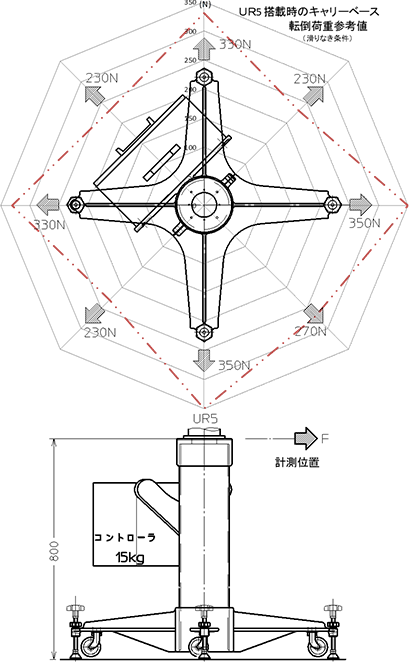
ユニバーサルロボット
UR10e用(12.5kg可搬)キャリーベース
2021年10月15日発売開始致しました。